Робот-захватчик Dextrous использует измерительную ленту вместо пальцев
Стальная измерительная лента - интересный материал, поскольку она достаточно жесткая, чтобы сохранять форму при растягивании, но достаточно гибкая, чтобы прогибаться под давлением. Ученые воспользовались преимуществами этой двойной природы в новом умном роботизированном захвате, предназначенном для работы с хрупкими предметами.
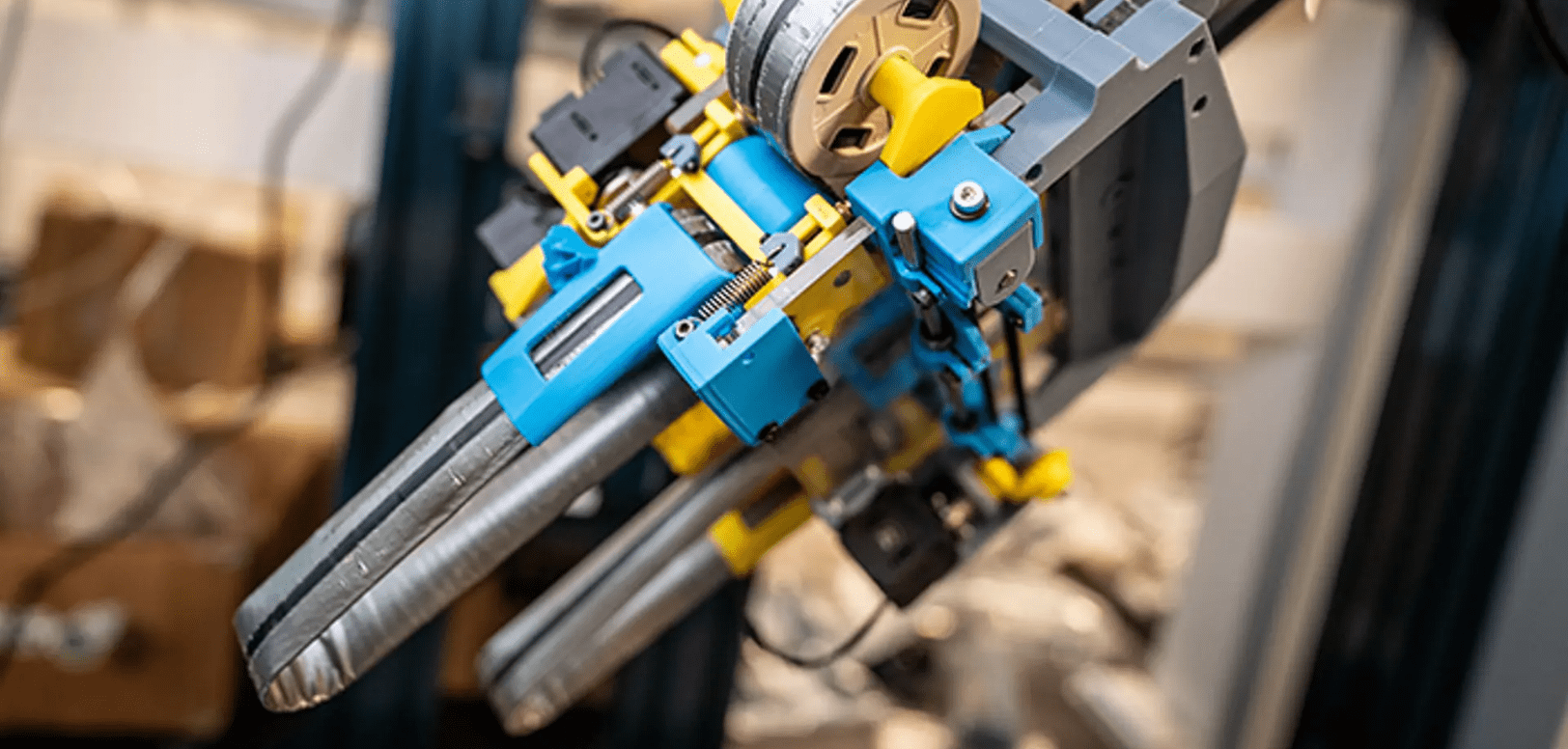
Создано доцентом. Профессор Ником Грейвишем и его коллегами из Калифорнийского университета в Сан-Диего этот механический отросток известен как "GRIP-tape", слово "ЗАХВАТ" означает "Захват и перекатывание в плоскости". Он захватывает предметы различных форм и размеров двумя цепкими, но послушными треугольными пальцами.
Каждый из этих пальцев состоит из нескольких отрезков измерительной ленты, которые накладываются друг на друга по длине и скрепляются клейкой лентой в такой конфигурации, что они образуют единую двухслойную ленту, которая сгибается на кончике пальца. Две моторизованные катушки – по одной на каждом конце этой ленты – сматывают ее и разматывают по мере необходимости.
Создано доцентом. Профессор Ником Грейвишем и его коллегами из Калифорнийского университета в Сан-Диего этот механический отросток известен как "GRIP-tape", слово "ЗАХВАТ" означает "Захват и перекатывание в плоскости". Он захватывает предметы различных форм и размеров двумя цепкими, но послушными треугольными пальцами.
Каждый из этих пальцев состоит из нескольких отрезков измерительной ленты, которые накладываются друг на друга по длине и скрепляются клейкой лентой в такой конфигурации, что они образуют единую двухслойную ленту, которая сгибается на кончике пальца. Две моторизованные катушки – по одной на каждом конце этой ленты – сматывают ее и разматывают по мере необходимости.
Изменяя направление вращения каждого из четырех барабанов (по два на палец) относительно друг друга, пальцы можно удлинять или укорачивать, поворачивать зажатый между ними предмет или втягивать его внутрь или наружу, как на конвейере. Весь захват также может перекатываться из стороны в сторону и наклоняться вверх и вниз, поворачиваясь на роботизированном запястье.
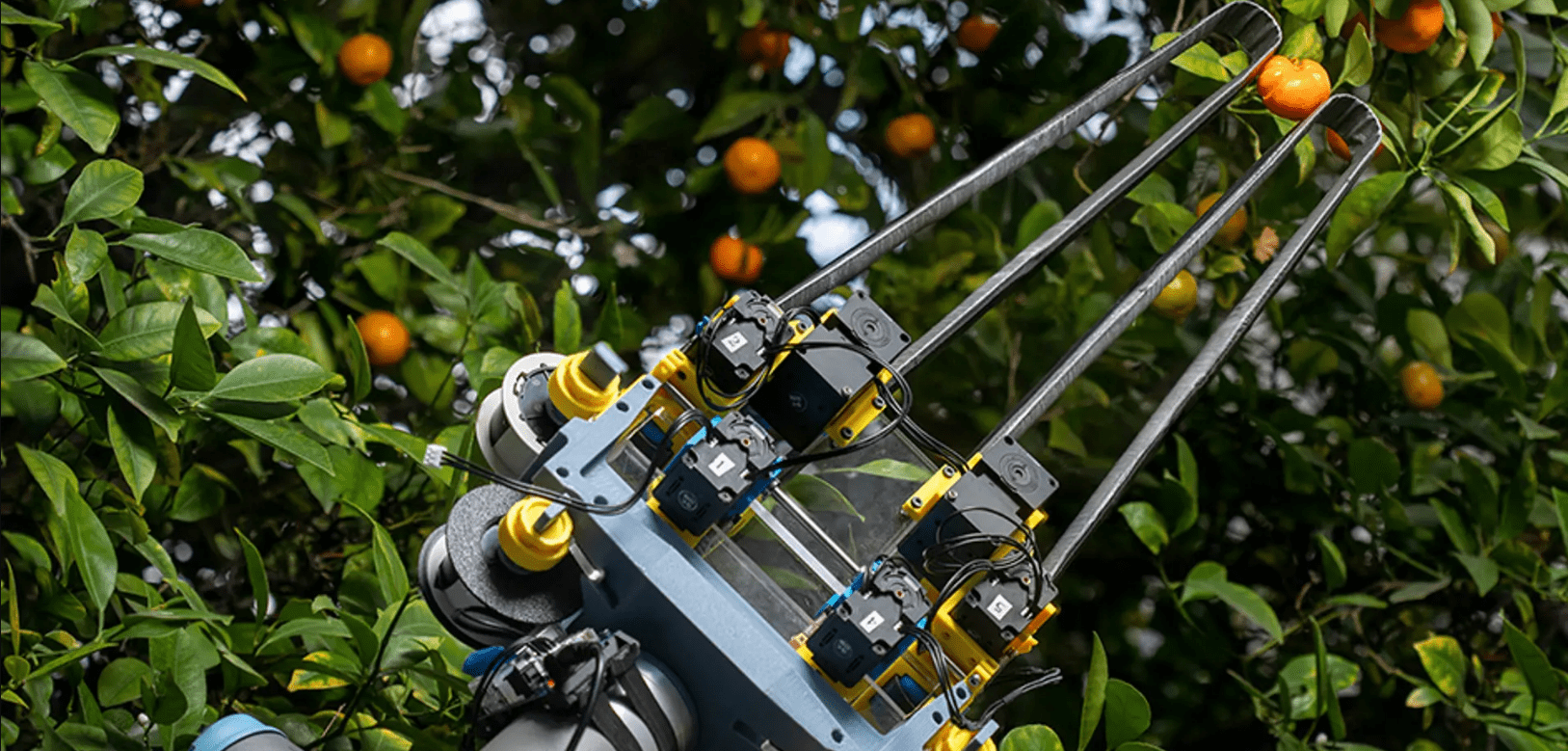
Есть надежда, что после дальнейшего развития технологии ее можно будет использовать в таких областях, как сельское хозяйство, для сбора фруктов и овощей, не повреждая их. На самом деле, робот UCLA EEWOC (усовершенствованный колесный шар с увеличенной досягаемостью для лазания) уже использует магнитную конечность на основе измерительной ленты для лазания по металлическим конструкциям.
Есть надежда, что после дальнейшего развития технологии ее можно будет использовать в таких областях, как сельское хозяйство, для сбора фруктов и овощей, не повреждая их. На самом деле, робот UCLA EEWOC (усовершенствованный колесный шар с увеличенной досягаемостью для лазания) уже использует магнитную конечность на основе измерительной ленты для лазания по металлическим конструкциям.
”Нам нравится искать нетрадиционные, неинтуитивные роботизированные механизмы", - говорит Грейвиш. "Рулетка - это такая замечательная конструкция, потому что в ней сочетаются мягкость и жесткость".
Статья об этом исследовании была недавно опубликована в журнале Science Advances.
Статья об этом исследовании была недавно опубликована в журнале Science Advances.
Видео работы на нашем телеграмм канале AgroBots